


DriveSim-100駕駛信號與通信協定模擬系統(Plus)
Part No.: MP-DriveSim100-Plus
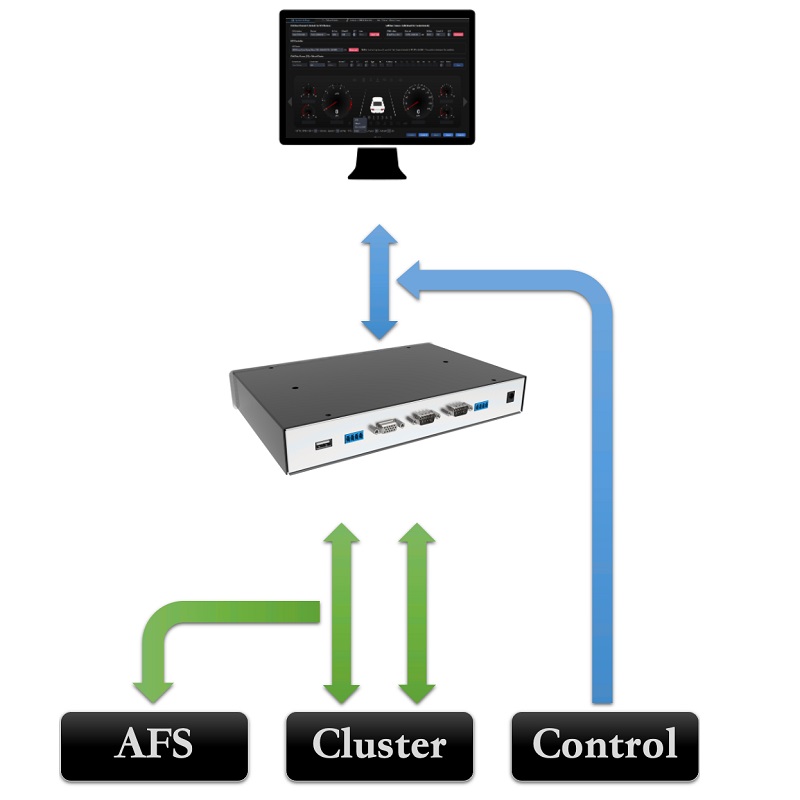
DriveSim-100 透過即時控制儀表板(Instrument Cluster)與自適應前照燈系統(AFS),可於駕駛模擬過程中監測實際的 CAN Bus 通訊數據。
本系統可協助使用者深入了解 CAN Bus 通訊架構與訊息傳輸模式,並提升對車用通訊系統的熟悉度。同時具備良好的擴充性,適用於車載應用之測試、開發與教學使用,是一套兼具實務與研究價值的模擬平台。
產品介紹
系統 / 硬體
模組與設備:
- 儀表板模組(Cluster Module,或 Ford Mustang 儀表板)
- 自適應前照燈系統模組(AFS Module)
- 方向盤控制器(Logitech 或 PXN)
- CAN Bus 通訊與控制單元
- 雙通道 CAN 2.0 A/B(CiA 303-1 DB9)
- USB 2.0-to-CAN 介面
- 儀表板控制模組
- AFS 控制模組
- 12VDC / 5A 電源供應器
軟體 (GUI)
設備控制器
- CAN 控制與配置(可獨立設定每個通道)
- 實體/虛擬介面
- 幀格式(標準 11-Bit / 擴展 29-Bit)
- 位元率(125 ~ 1000 kbps)
數據幀編輯器
- 可編輯參數:包括 22 個物理輸入與 26 個虛擬輸入
- 高彈性:可詳細自訂 CAN 數據幀內容
- 控制器輸入對應功能
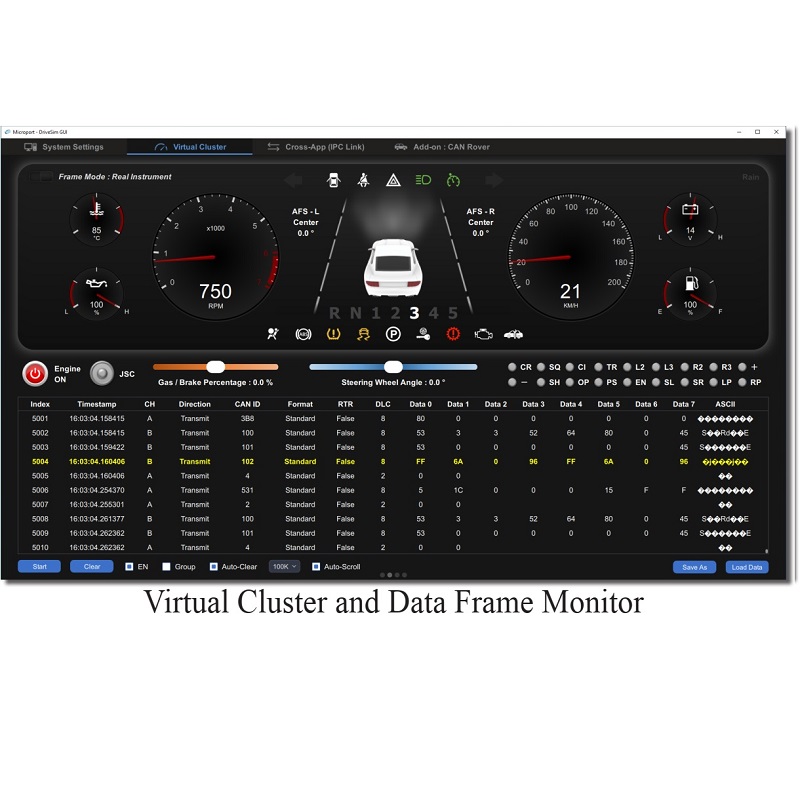
虛擬儀表板
- 控制模式:支援物理控制器輸入及全虛擬控制
- 即時顯示:可視化 6 個儀表與 21 個指示燈的即時數據
- 互動調整:可透過拖曳修改數值,並即時同步至儀表板
- AFS 模擬功能
- 支援 Class V/C/E/W 模式(ECE324-R123)
- 即時監測:顯示頭燈狀態及內外旋轉角度
- 天氣模擬:可切換乾燥/濕潤條件(專為 Class W 設計)
- 物理模擬:可配置道路阻力參數,用於 RPM/車速衰減
數據幀監控
- 即時顯示:包括 ID、FF、DIR、RTR、DLC、DAT(Hex)與 DAT(ASCII)
- 分段檢視:依 CAN ID 分組檢查數據
- 數據記錄器:支援 CSV 匯入/匯出
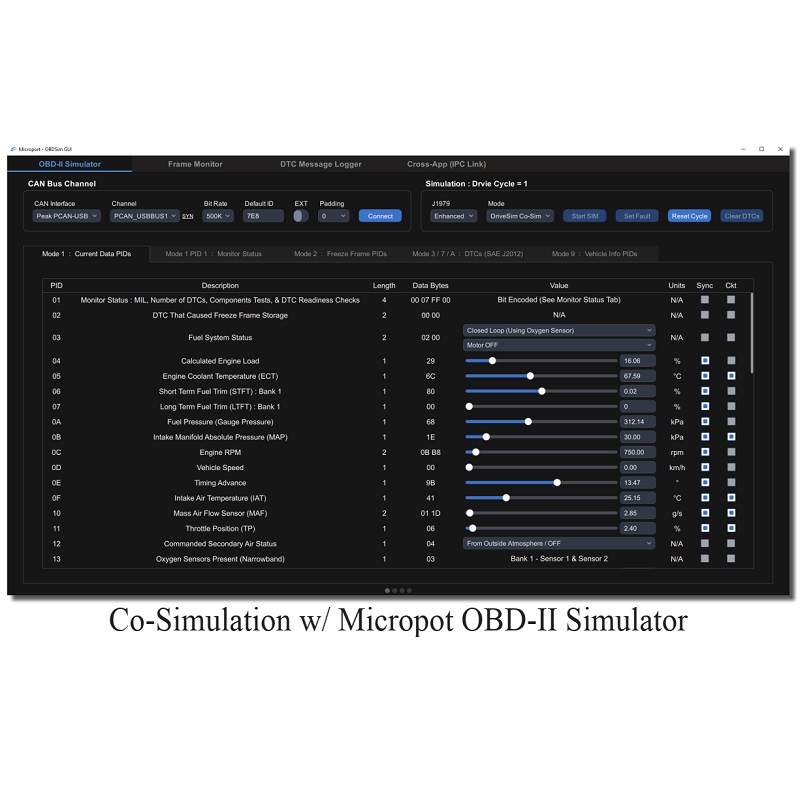
附加功能(選配)
- 基於 ZMQ 的進程間通訊(可與其他系統聯合模擬)
- CanEduDev CAN Rover 控制功能